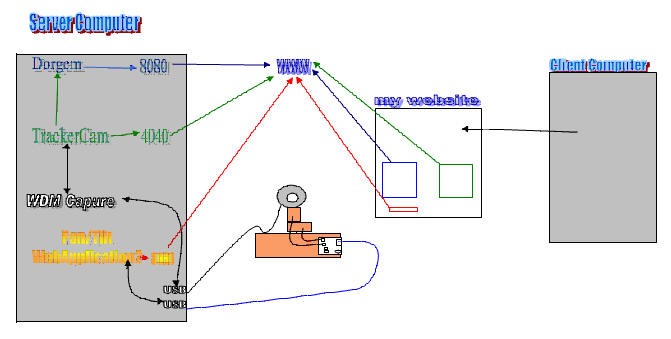
So What is going on here is that there are three programs. First of all I am running TrackerCam. TrackerCam calls the WDM Capture to which then goes to the camera to get the picture. From here the picture is returned to TrackerCam which will send this picture out to Dorgem. So, Dorgem is set up to get its picture from TrackerCam. Trackercam then sends out the image through port 4040, and Dorgem sends the image out on port 8080. From here a client computer opens the website which will grab the image from the server computer and display it on the website.
Now for the third program. My Pan/Tilt application is a Visual Basic ASP.NET Web Application. This program will broadcast out on port 80, http. From here, when a client clicks on the link, it will open the program running on the server computer. All of the controls are done at the server level to move the camera up down left and right. The server computer program will go out to the phidget device and tell it to move which ever way is specified. The phidget device will then send back the exact reading of the angle that the motor is at.