Example of the template visual studio projects that come with the 1.8 Kinect SDK

The output of the plain depth sensor camera of the kinnect without any adjustment to the GUI or any depth calculations.
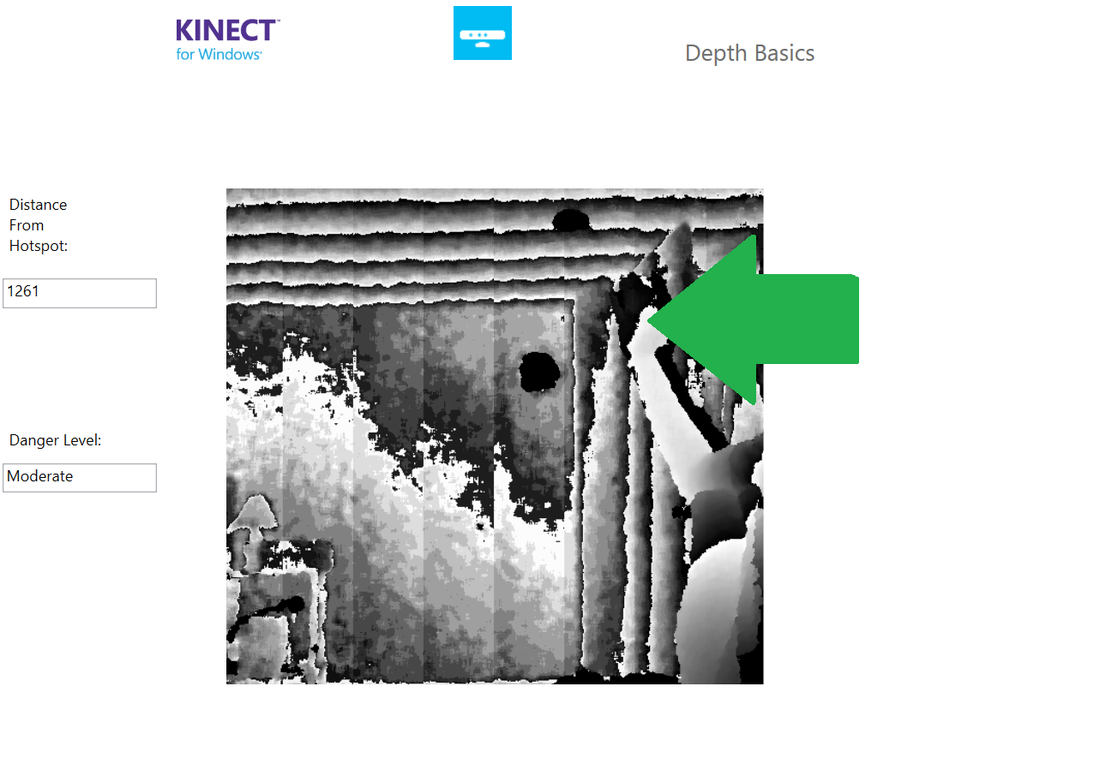
The green arrow indicates a designated pixel hotspot and the Distance from value is the real-time distance away from the camera in terms of millimeters.
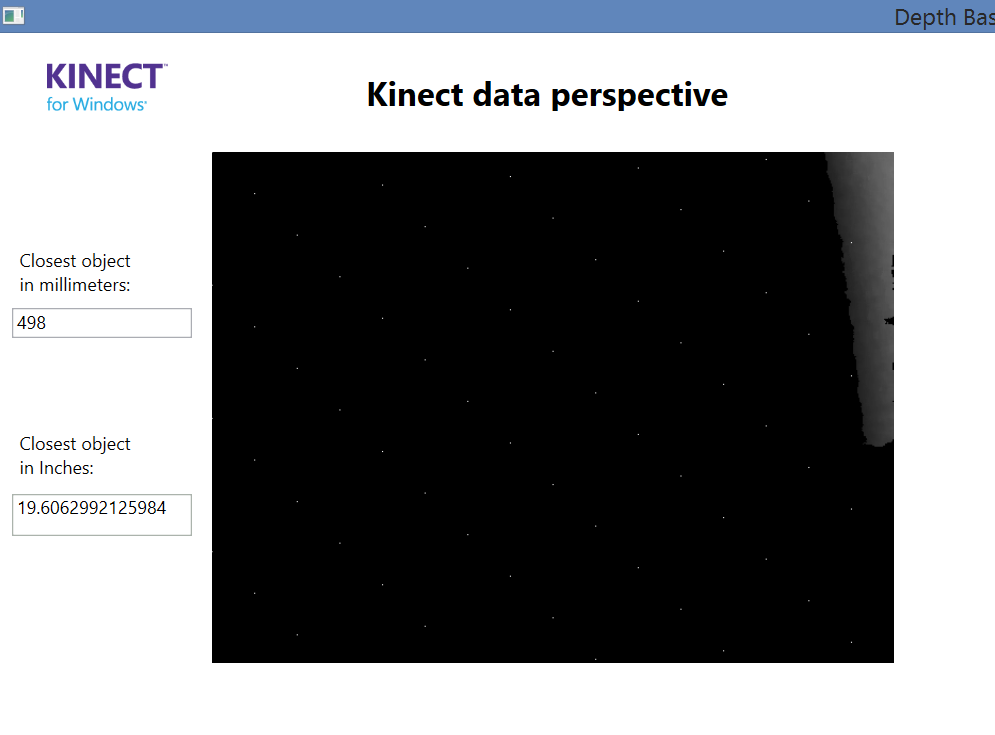
The subset hotspot array of pixels have been illuminated white in this picture. The object closest to any of the n hotspots is displayed to the left in both millimeters and inches.
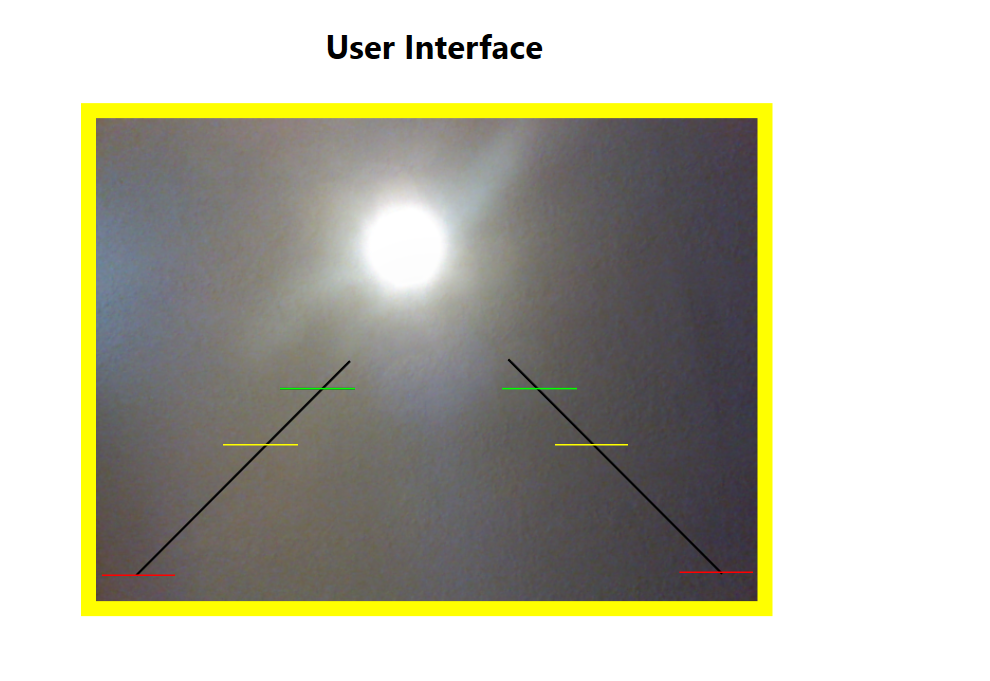
The border around the user interface changes between green, yellow, and red depending the state of safety. The values change in real-time depending on what is in the current frame.
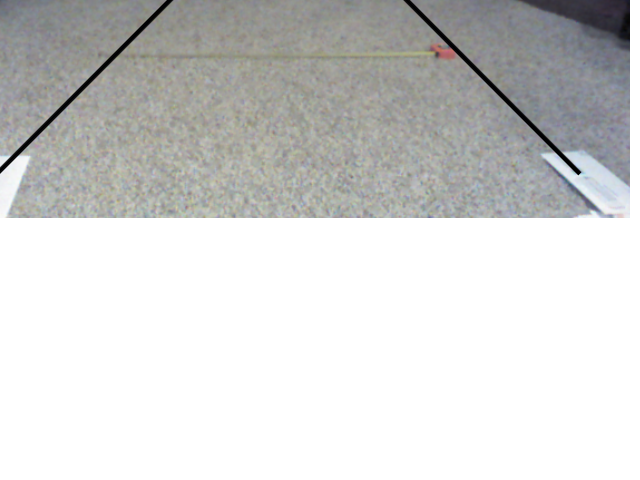
The creation of the guiding lines is based on the real-life measurement of roughly 40 inches. The lines where the width of a 40 inch vehicle will be based on the lines. The height of the camera and angle of the lens are important values to consider.
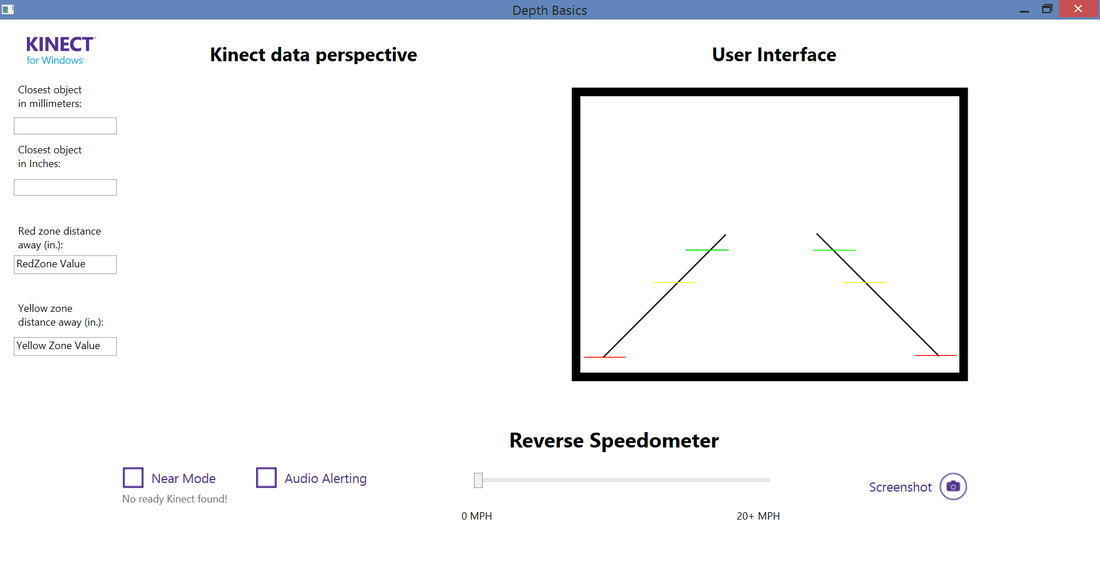
The final interface without a Kinect connected. The status bar reads "No ready Kinect found!" indicating the lack of hardware to the user.
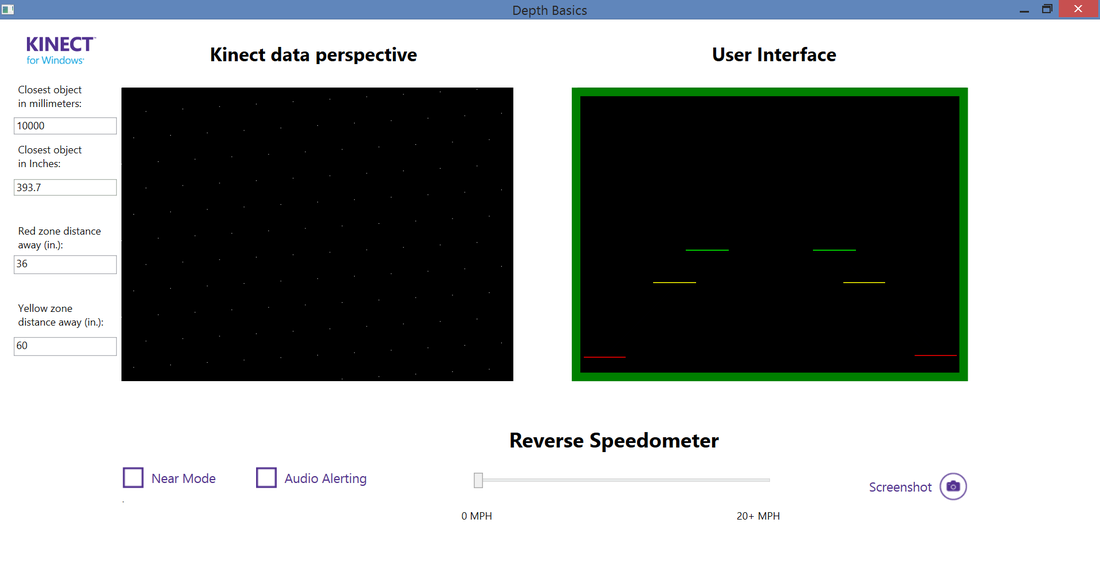
The final user interface. The distribution of working pixels can be seen highlighted in white on the left screen. The camera is covered making the values and detection unreliable. Objects within 2 feet of the camera are typically recognized as unreliable.