Project Requirements:
-The bot should understand its environment and know the location of its contents, probably using a modified geo-mesh to map the lab layout. ✔
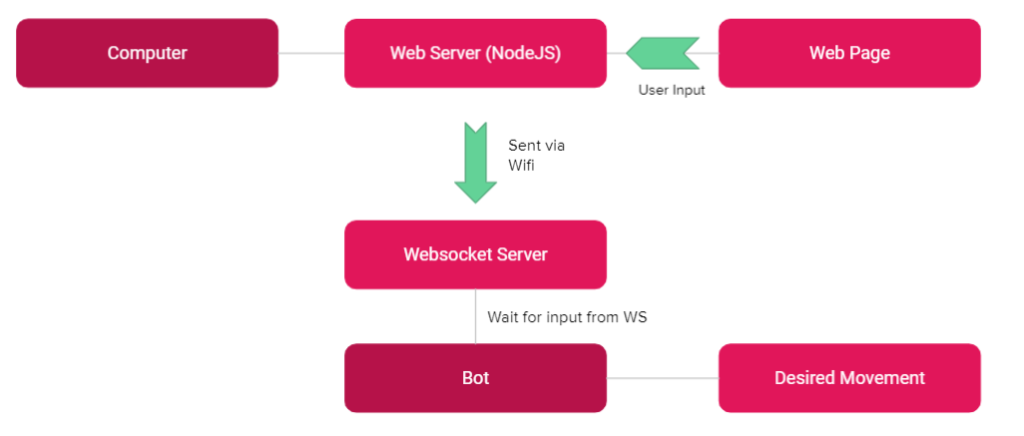
-Users can instruct the robot much like an rc vehicle. The bot responds as long as it is safe to do so. ✔
-Users direct the mascot to move toward a target while avoiding obstacles. ✔
-The lab robot should avoid obstacles that appear unexpectedly. 
-Of course, many students will want to be the bot’s guide. The controller should be able to queue requests using an appropriate scheduler ❌
-Potentially a camera ❌ (Unsure if able to fully implement)
-Investigate sensors and components that will help the bot achieve your goals. ✔
-The bot needs a name and a personality/attitude. ✔