|
Looking outside Cofrin 101 |
|
Pete's robot is angry when you take its picture
|
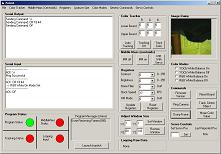 |
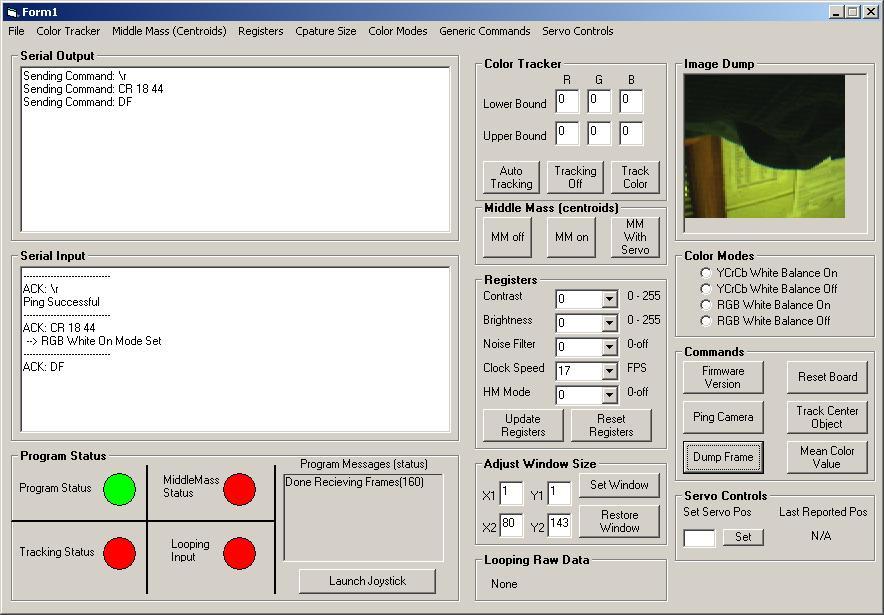
This is the initial program, it has the ability
to control all of the CMUcam's features. Also has the ability
to control the 4D4T robot using a joystick. |
 |
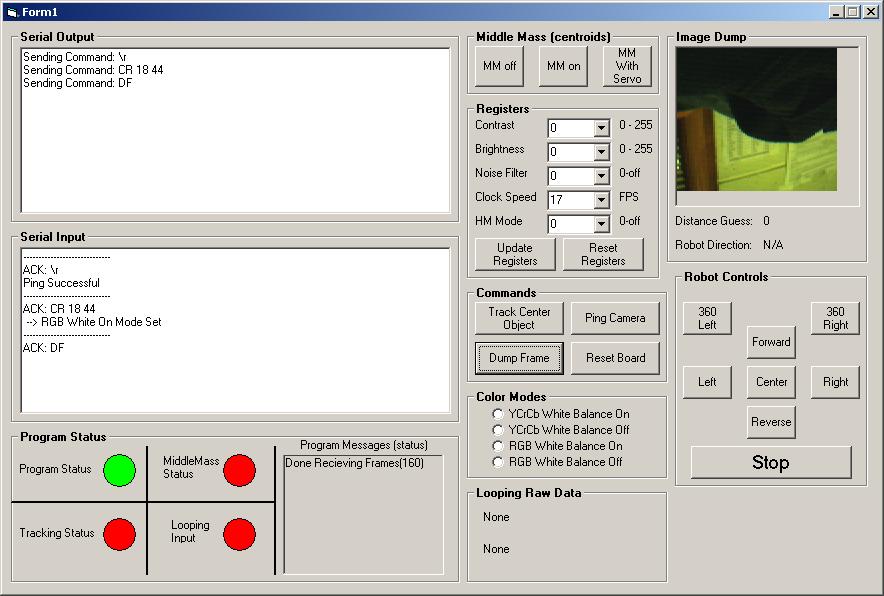
This looks like the above program, but this
one is the program that controls the robot based on the CMUcam's
data. It also comes equiped with a joystick in case something
bad happens |
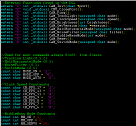 |
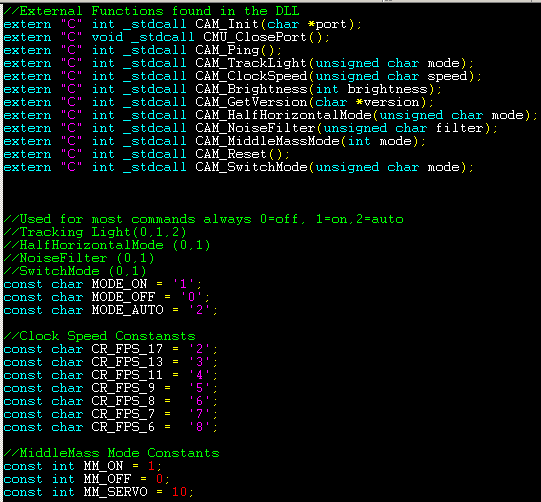
The header file listing all the functions in the dll (as of
3-6-2006) as well as the constants that will be used in the
SDK. |
 |
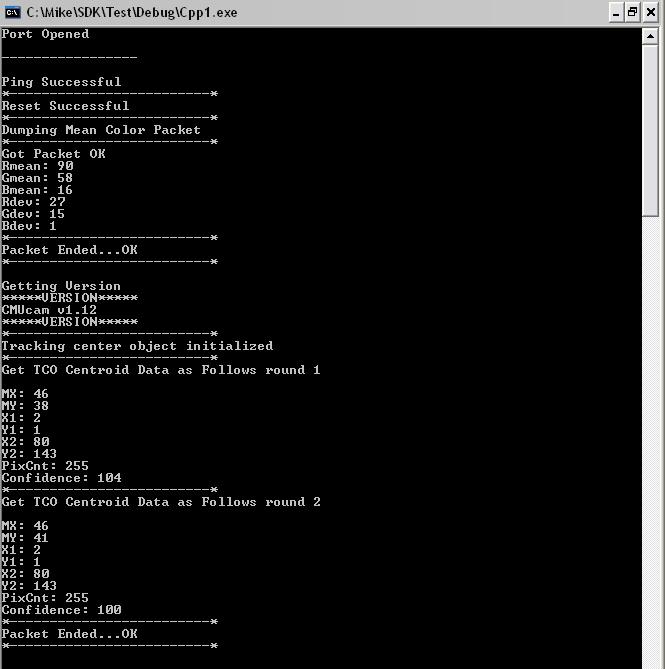
Screenshot of the reading of packet data in C++ from the dll
which is created in C |
Video
"Right Click, Save Target As to
download" |
Video of the the CMUCam using the servo to follow an object.
Which in this case is a red frisbe. |
Video
"Right Click, Save Target As to
download"
|
Video showing the speed at which the binary data can be processed and displayed |
|
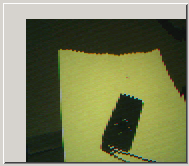
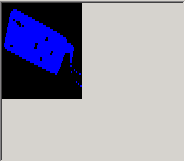
Original image of my Ipod taken with the CMUCam. The blue and black one is the binary data ( flipped the ipod after taking the first image thats why it is rotated, but it is still clearly identifiable in the binary image) |
Video
"Right Click, Save Target As to
download" |
Latest video of the follow me in action. Be warned the batteries were wearing out when it was made so the turning isn't as crisp as it normally is. |
Walkthrough PowerPoint
Link |
This is the presenation I used when going through my walkthrough mid project. It may contain usefull information for people who have to work with my project as a base. |
Final PowerPoint
Link |
This is the powerpoint I used during my final presentation. Again it may conatain useful information for those who have to use my project in the future |