
Robot Remotes
|
Robot Remotes |
| Home | What I Started With | Journal | Philosophy | Resume | Timeline | Download Project |
Journal
1/29/06
As of now, I have simply ordered the model of
robot, the robosapien that I will be using in my project and have ordered the
infrared transmitter for my computer that will allow me to send infrared signals
to the robosapien to control it. In addition to that, I have begun work on my
Website.
My strategy
for completing this assignment is to first find the infrared signals that the
robosapien gets from the remote control and create a virtual replication of
the remote on the computer that allows users to operate the robosapian in real
time using the computer interface rather then the remote control. The second
stage of my plan is to develop a program compiler that will take instructions
that are pre-written and run them on the robosapien.
1/31/06
I made a few changes to my website as far as
adding my resume in HTML and downloadable format. I have also fixed several
spelling mistakes that were in my website.
2/1/06
This is more of an update for today and what I left out of my
entry for yesterday. Yesterday I got the infrared transmitter that will be used
to send the signals to the robosapien. I therefore spent several hours that
day trying to figure out how to talk to the device. I never did find out how
to talk to the USB-UIRT so today I went for a visit to Prof. Rohm. She helped
me find where the unique identifier was for the device so now I have a base
to start from. I have also found several internet sites that tell how people
have made programs that run robosapien using the same infrared transmitter that
I am using with the exception that they are using a program called Girder. This
is a program that automatically uses the USB-UIRT to send signals to preprogrammed
receivers such as the T.V., Cable, and in my case the robosapien. This is some
#)$@&#^*!. I am going to use the USB-UIRT in my own language to control
the robot.
2/5/06
Ok, so after four days of pure frustration and not being able to find anything on the internet that told me how to talk to the USB-UIRT, after asking my professors and my relative, Phil Cannon, I finally found what I was doing wrong. Apparently the USB-UIRT API and DLL commands that are needed to talk to the USB-UIRT outside of user interface programs (i.e. girder) are not giving with the initial buying of the product, but must be asked for via e-mail. So today I sent the e-mail to USB-UIRT support asking for help. I hope to be hearing back from the company soon so that I can finally make some forward progress.
2/8/06
Jon from the USB-UIRT sent me the API's and DLL's necessary to control the USB-UIRT without the use of the Girder program; he also sent sample code that shows you how to use the USB-UIRT. This has been an enormous help, if you are reading this Jon, thank you for all your help. After playing with the USB-UIRT I found that I couldn't get the USB-UIRT to transmit the IR codes that I found on the Internet, after a little bit of research I found that the problem was that the USB-UIRT sends signals in Pronto Format and the Robosapien only receives in Pronto Format. Luckily for me, Jon's sample code comes with a mode that picks up IR signals and displays it in Pronto Format. I have started to make a file of all the codes on the Robosapien controller and will eventually create a link to the file when I have it complete. I have tested the Pronto IR code by sending them back through the USB-UIRT to the Robosapien and they do work.
2/25/06
Been a while since I wrote anything
down so here is the update: the list of pronto code for Robosapien is done,
click here to get the .txt. In addition my base program
is coplete with a live, easy to use, and organized user interface. the next
step is to clean up my base program and begin work on the programming language
aspect of the project.
3/20/06
I've been working on the programming
language side of the project now and think that I should be further then I am.
Instead of boring whoever is reading this with more text, here is some screen
shots of the project as it stands today.
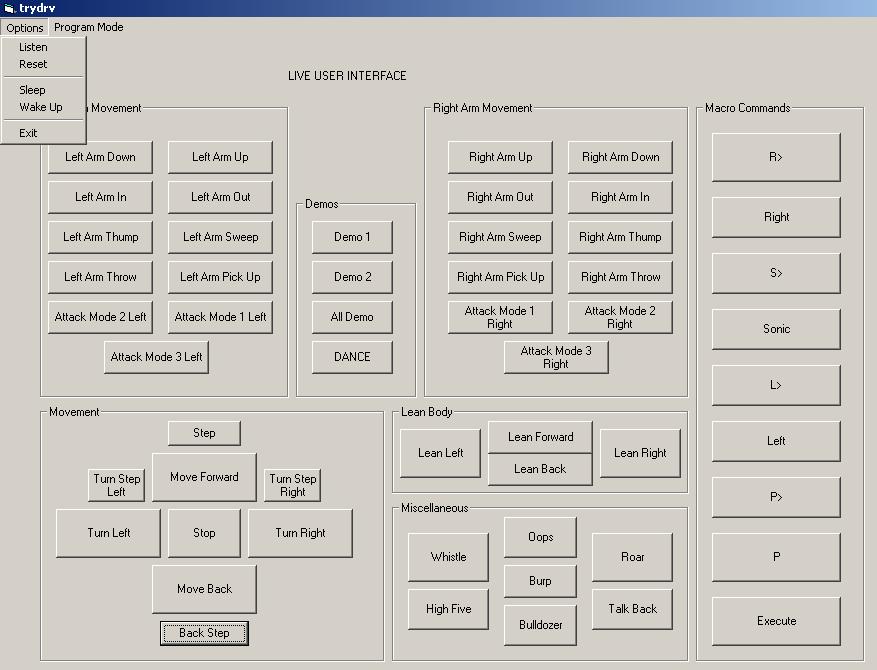
This is the first part of the program that runs much like the controller. You click a button or select a menu option and the Robosapien responds accordingly. This next tidbit is the programming language portion. There are two parts to this section of the project, there is the image programming, meant for people who don't want to get into detail with text and there is a text option that will let you enter the commands via a text box. Neither are as close to completion as I would like them to be
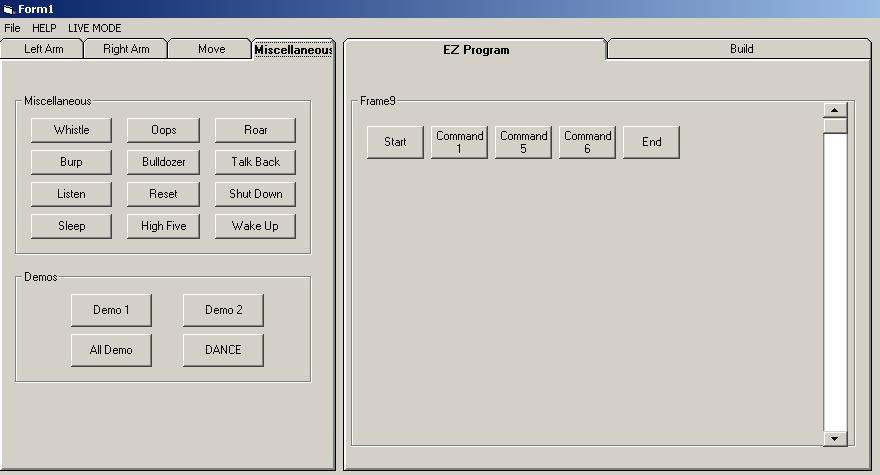
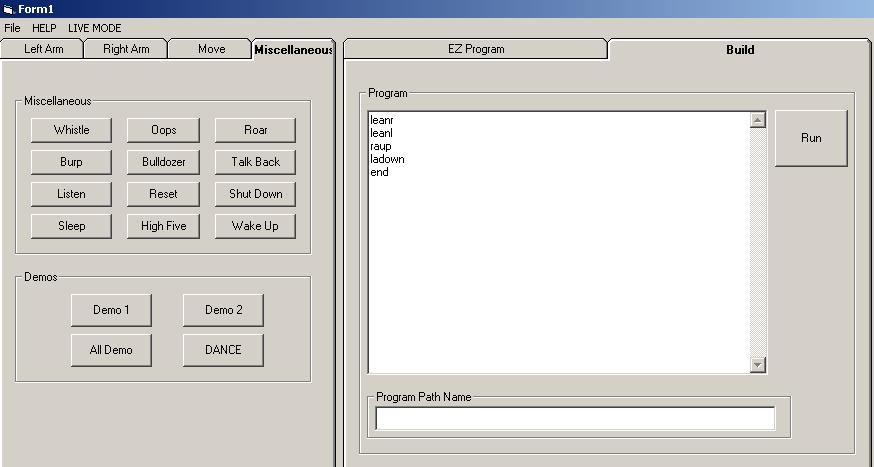
The end Idea that I am shooting for is that as are coding you will be able to switch back and forth between the image section and the text section with both being updated. I have a lot of work to do and not much time to do it. Also the above pictures are what I have to date and are very likely to change as the program develops.
4/23/06
Another month as gone by and the project
has blossomed. The program is finished with all bugs that I am currently aware
of worked out. A user manual has been written and I believe the program is ready
for use. Changes that have happened are as follows: the aspect of the "EZ
Program" as I called it before has been removed, in its place the "Build"
section presented above has been modified so that when buttons on the left are
clicked, they are added to the program, also the option to build a program outside
and import it is available in case the user does not like the building area
provided.
Everything made is available here, Please enjoy.