Project Demonstration
Server Images
This is the begining server form. The client uses this to select which COM port the robot is connected through.
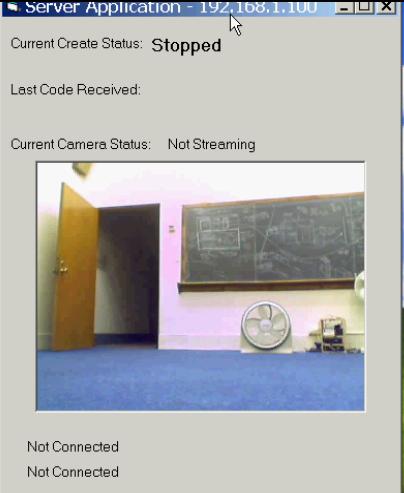
The initial state of the server application, before the client is connected. Notice that the title of the gives the internally-assigned IP
address of the server application. Also, the video state is set to "Not Streaming" and the status of the two sockets (bottom of the screen) is "Not Connected".
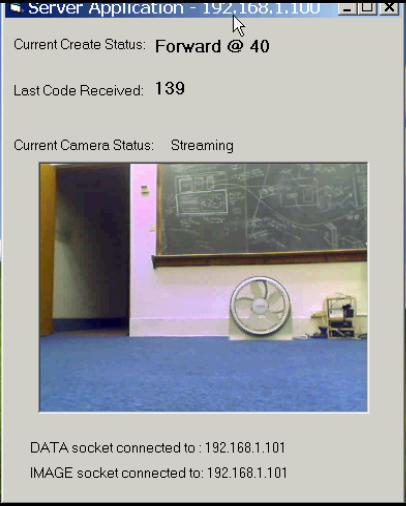
The state of the server application as it is running. The state of the Create is displayed along with the last psuedo-code recieved. Note that both
sockets are connected and the video is streaming.
Client Images
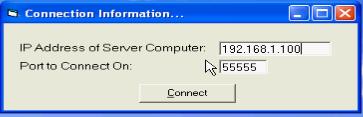
The first client form, used to connect to the server application.
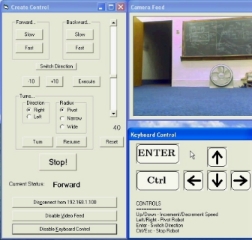
The main interface of the client application.
(Click for full view and explanation)
(Click for full view and explanation)
Videos
Here is a video showing my solution in action. It is made of three videos that show the same operation. The videos show the screen capture of the server and client applications along with the movement of the robot as the user controls the robot.
Note: Since this video is basically a screen capture of me playing all three videos at once, the three videos do not line up exactly. It may appear that there is some lag between the three videos. This is only because I didn't synch the three videos perfectly. The amount of lag during the actual execution of the program is undetectable/insignificant. The robot video also appears to stop towards the end of the this clip however the server and client clips contiue to show.
Note: Since this video is basically a screen capture of me playing all three videos at once, the three videos do not line up exactly. It may appear that there is some lag between the three videos. This is only because I didn't synch the three videos perfectly. The amount of lag during the actual execution of the program is undetectable/insignificant. The robot video also appears to stop towards the end of the this clip however the server and client clips contiue to show.
Presentation
Here is the PowerPoint I used for my presentation that I delivered at the completion of the semester.